Pyramid Projection 对于全景应用的提升
原型Equirectangular投影的文件大小
众所周知,在全景应用中,用的比较多的无非是Equirectangular(等距圆柱投影)以及CubeMap(立方体投影)。
前者是360°图像或视频的直接数字化存储格式,还有我们地球的投影也是利用了Equirectangular的投影方式。
Equirectangular的投影方式就如下图所示。

其中它的文件像素比为2:1,图像上方4:0.5的图像是顶部的投影,图像下方4:0.5的图像是底部的投影,中间4:1的四个1:1正方形是前后左右四个方向的投影。
以面的像素值来计算的话可以看到文件大小为4:2
CubeMap图像的文件大小
而Facebook早前提出了一种新的格式用于储存全景投影,就是CubeMap,如下图所示。

对于CubeMap图像来说它也是由六个方向的投影组成的图像,其中从上至下从左至右分别是右左上下前后六个面,宽高像素比是3:2。
可以很明显的看到文件大小是有所减少了,因为CubeMap图像将Equirectangular图像顶部和底部的两个面重复的像素去除了,文件大小相对Equirectangular减少了25%。
所以在服务器上储存的时候,就可以减少一定的空间了。
Pyramid Projection图像
现在,Facebook又提出了新的图像投影方式Pyramid Projection,它能够减少80%的文件大小。
简单来说,它是利用了用户可能会聚集某个时间段只关注一个角度的图像,另一个时间段关注另一个角度,那么只需要根据用户观看的方向设定椎体的底部为正向即可。
根据这一个工程性的方法,我们先静态制作几个不同方向的金字塔投影,再根据用户视角动态读取不同文件。
这样做的好处是什么呢?锥形投影图像的像素大小小了很多!因为只关注一个面,所以锥形投影图像的大小只有Equirectangular投影图像大小的20%,所以GPU在做纹理渲染时,时间成本大幅下降!用户再也不用因为GPU设备性能差而等待视频缓冲了!
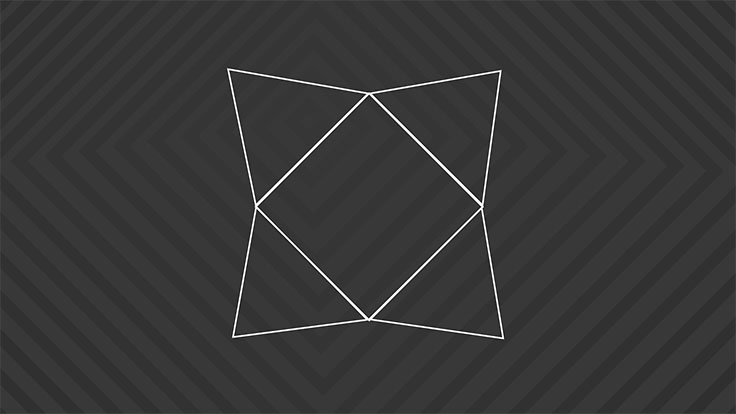
这里值得注意的一点是,四个角落的三角形投影时不可能是等腰直角三角形,否则无法构成椎体,需要进行在垂直方向上扩展成等边三角形,至于如何扩展下面会详细说明。
- Pyramid Projection 实现
简单来说,思路是这样的。利用坐标变换使锥形投影平面展开图上的点和椎体模型一一对应,这里要用到坐标系转换的线性代数方法,用变换矩阵乘上点的坐标得到新坐标系下的坐标。
求出每个平面上的点对应的三维空间坐标后,再利用椎体上的点到球心的垂直方向夹角和水平方向夹角,求出椎体到球体的转换,这个方法和Equirectangular转换到CubeMap的方法是一样的。
1 | # This Function create an pyramid projection image and set the color |
输出的结果是这样的
